La bande dessinée qui retrace l'histoire des techniques pour éclairer l'avenir
Le conservatoire qui rebranche sur le NET ce que lhistoire a laissé derrière elle
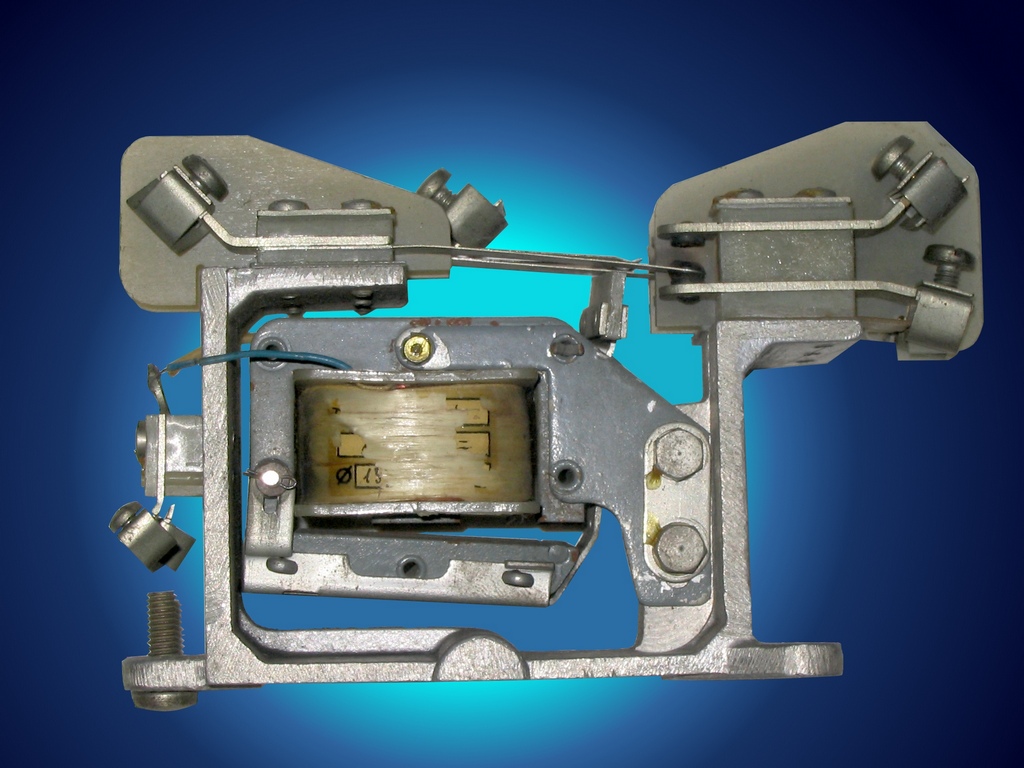
relais inverseur Paris MTI RGV 48V
Le relais peut être considéré historiquement comme le premier composant actif en ce sens que la puissance quil peut contrôler peut être plus élevée que celle quil absorbe. Un relais est un interrupteur qui se télécommande par un courant électrique. Un interrupteur est un contact électrique mobile. Pour maintenir le contact fermé -état passant ou 1 logique-, il faut appliquer une pression sur le contact ; pour garantir louverture du contact -état ouvert ou 0 logique- et maintenir lisolement il faut éloigner suffisamment les conducteurs en contact. Ces déplacements et ces forces sont obtenues dans un relais par laction dun électro-aimant, doù lappellation électromécanique ou électromagnétique pour ce type de relais.
A noter que les relais sans pièces mobiles donc utilisant des composants purement électroniques tels que des transistors ou des thyristors sont appelés relais statiques.
La force exercée par un électro-aimant est dorigine magnétique. Les ingrédients suivants sont utilisés :
1) Le fer doux sert à conduire et à augmenter des lignes de force magnétique. Lastuce est davoir un circuit magnétique déformable avec une partie fixe magnétisée par une bobine et une partie mobile qui referme le circuit magnétique..
2) Une bobine de fil de cuivre parcourue par du courant électrique magnétise le fer. On appelle ce courant : courant magnétisant. Cest la résistance de la bobine et la tension dalimentation du relais qui détermine ce courant. Ici la tension est de 48 V.
3) Une fois le fer magnétisé, il attire la palette magnétique qui était maintenue éloignée par un ressort antagoniste.(Souvent leffet élastique des lamelles de contact). Cette palette applique les lamelles de contact contre le contact fixe et le circuit électrique se referme. Le temps que le courant passe, on a deux aimants qui se collent. On parle de force de collage. Le relais est dit en position de travail.
Pour couper le contact, il suffit de couper le courant pour que le fer perde sa magnétisation et alors la force du ressort antagoniste rompt le contact et le relais souvre. Le relais est alors en position de repos.
Le gain en puissance est intéressant et il dépasse facilement 1000. Cest à dire quavec 1 W dissipé dans la bobine de commande, on peut commuter un courant de 10 A et maintenir une tension disolement de 100 V.
A noter que cest le débattement des contacts qui détermine la tension commutée surtout pour garantir lextinction des arcs.
On peut très bien commander des relais avec dautres et toutes les fonctions logiques actuelles ont dabord fonctionné avec des relais. Tous les centraux téléphoniques automatiques jusque dans les années 1970 utilisaient des fonctions logiques à relais.
Les premiers ordinateurs des années 1940 utilisaient des relais par milliers.
Quelques phénomènes de physique sinvitent pour rendre le fonctionnement des relais un peu plus compliqué.
Courant dextra-rupture dans la bobine de commande : Lorsquun courant est établi dans une bobine, une énergie magnétique E sy trouve stockée : cest
E = ½ L*I^2. Il se trouve que ce courant ne peut pas disparaître instantanément, il cherche à se prolonger. Cest là quun autre phénomène intervient, cest la capacité répartie du fil du bobinage qui justement va absorber ce courant. Lénergie magnétique va se transférer sous forme dénergie capacitive ½ C* V^2 et la tension aux bornes du bobinage va augmenter et on aura des surtensions aux bornes de la bobine qui pourront aller jusquà produire des claquages et autres étincelles. Ce nest pas fini, une fois la capacité répartie chargée, elle va refournir du courant à la bobine et cest ainsi que lon crée un circuit oscillant. Ce sont les oscillations de courant dextra-rupture qui ont été exploitées au début de la radio pour faire fonctionner les émetteurs à étincelles amorties.
Ce courant dextra-rupture est le principe même des bobines de Ruhmkorff où lon augmente les surtensions par un effet transformateur qui multiplie la surtension. Cest ainsi que lon a obtenu les dizaines de milliers de volts pour faire fonctionner les tubes à rayons X du début .
Les moteurs à explosion des voitures utilisent toujours des étincelles dextra-rupture pour lallumage.
En pratique pour les relais électromécaniques, les pertes P par effet Joule dans la résistance R de la bobine P = R* I^2 finissent par amortir les oscillations. Pour limiter les surtensions, on peut ajouter de la capacité aux bornes de la bobine ou encore mieux rajouter une diode en parallèle dite de roue libre qui permet au courant de se prolonger sans charger la capacité répartie.
Courant dextra-rupture dans le circuit des contacts : Cest le cas des relais qui commandent des moteurs électriques. Lénergie magnétique du moteur tend à se dissiper dans des arcs dans les contacts. Les arcs sont destructeurs des contacts à beaucoup de titres :
Leur température dépasse la température de fusion des métaux usuels comme le cuivre et de plus
Le champ électrique tend à déplacer les métaux et créer des déformations des contacts comme des cratères.
Leffet de résistance négative des arcs tend à maintenir le passage du courant en train dêtre coupé surtout si la tension est continue.(Pas de passage par 0 de la tension qui éteint les arcs). Doù des systèmes compliqués pour allonger les circuits darc par soufflage dair comprimé ou par champ magnétique.
Pour limiter lérosion des contacts, on a mis au point des contacts très bons conducteurs de la chaleur à base dargent et dopés avec des adjuvants comme le palladium qui donnent un effet réfractaire.
Le relais représenté ici a deux paires de contacts de façon à commuter deux circuits différents.
De plus chaque position ferme un contact et en plus dune fonction interrupteur on a une fonction aiguillage. Cet arrangement de contacts est appelé inverseur en référence à lapplication où les contacts fixes sont deux polarités opposées et que lon peut ainsi commander linversion de sens de rotation dun moteur à courant continu.
En commande de moteurs triphasés, on a jusquà 5 circuits commutés.
Le déplacement mécanique nest pas instantané en raison des forces dinertie et de frottement de sorte que la fréquence des commutations des relais est très dépendante de leur taille.
Les relais les plus rapides sont les relais miniature à lame souple magnétique ILS qui peuvent commuter jusqu'à 1 kHz.
Les vibrations mécaniques des contacts provoquent des phénomènes de rebond. Pour les supprimer, on peut enduire ou mouiller les contacts de mercure qui maintient le passage du courant malgré les vibrations.
Pour éviter de gaspiller de lénergie pour maintenir la magnétisation du relais, on peut utiliser des matériaux magnétiques durs qui mémorisent leur magnétisation. Ces matériaux ayant une forte aimantation rémanente réalisent des aimants permanents. Ces relais à économie dénergie sont appelés relais bistables.
Dans les tableaux électriques, on utilise des relais spéciaux appelés disjoncteurs qui permettent de couper le courant en cas de perte disolement ou lors de surintensités ; ce sont respectivement des disjoncteurs différentiels ou des disjoncteurs magnéto-thermiques.
Voir des exemples de circuits à relais utilisés en télécommunications dans la galerie : télécommunications / Commutation /:électromécanique.
Un relais plus complexe permettant de commuter séquentiellement plusieurs contacts est représenté en : moteur relais pas a pas selector palette mobile.
Les circuits magnétiques qui se déforment en permanence sont les moteurs électriques qui sont répandus en grand nombre un peu partout. Une voiture bien équipée en éléments de confort en comporte une vingtaine


| Auteur | Ph Maliet |
| Créée le | Dimanche 27 Août 2006 |
| Ajoutée le | Jeudi 20 Décembre 2007 |
| Dimensions | 1024*768 |
| Fichier | relais_inverseur.jpg |
| Poids | 242 Ko |
| Tags | arc, commutation, Condensateur, contact, décharge, Inductance, magnétique, mémoire, résistance |
| Catégories | |
| Visites | 23481 |
| Note moyenne | 3.00 (noté 2 fois, écart type = 2.00) |
[0] Commentaires des utilisateurs