La bande dessinée qui retrace l'histoire des techniques pour éclairer l'avenir
Le conservatoire qui rebranche sur le NET ce que lhistoire a laissé derrière elle
Le système de positionnement est très compliqué car le satellite Telstar était un satellite défilant. Il fallait que lantenne puisse prendre le satellite à son lever puis laccompagner dans sa course jusquà son coucher. Il fallait contrôler deux mouvements ; le montage de lantenne étant à 2 degrés de liberté azimut et site. La durée de révolution était de 2h37 et la durée de visibilité maximale de 30 mn.
Il fallait donc faire mouvoir 380 tonnes avec une précision de pointage de 0.06° soit 3.6 dangle et avec une variation dangle de 1.5° /seconde au maximum.
Il y avait un double système de pointage : un auto-pointage du type monopulse des radars avec un asservissement et une commande numérique élaborée à partir des paramètres orbitaux.
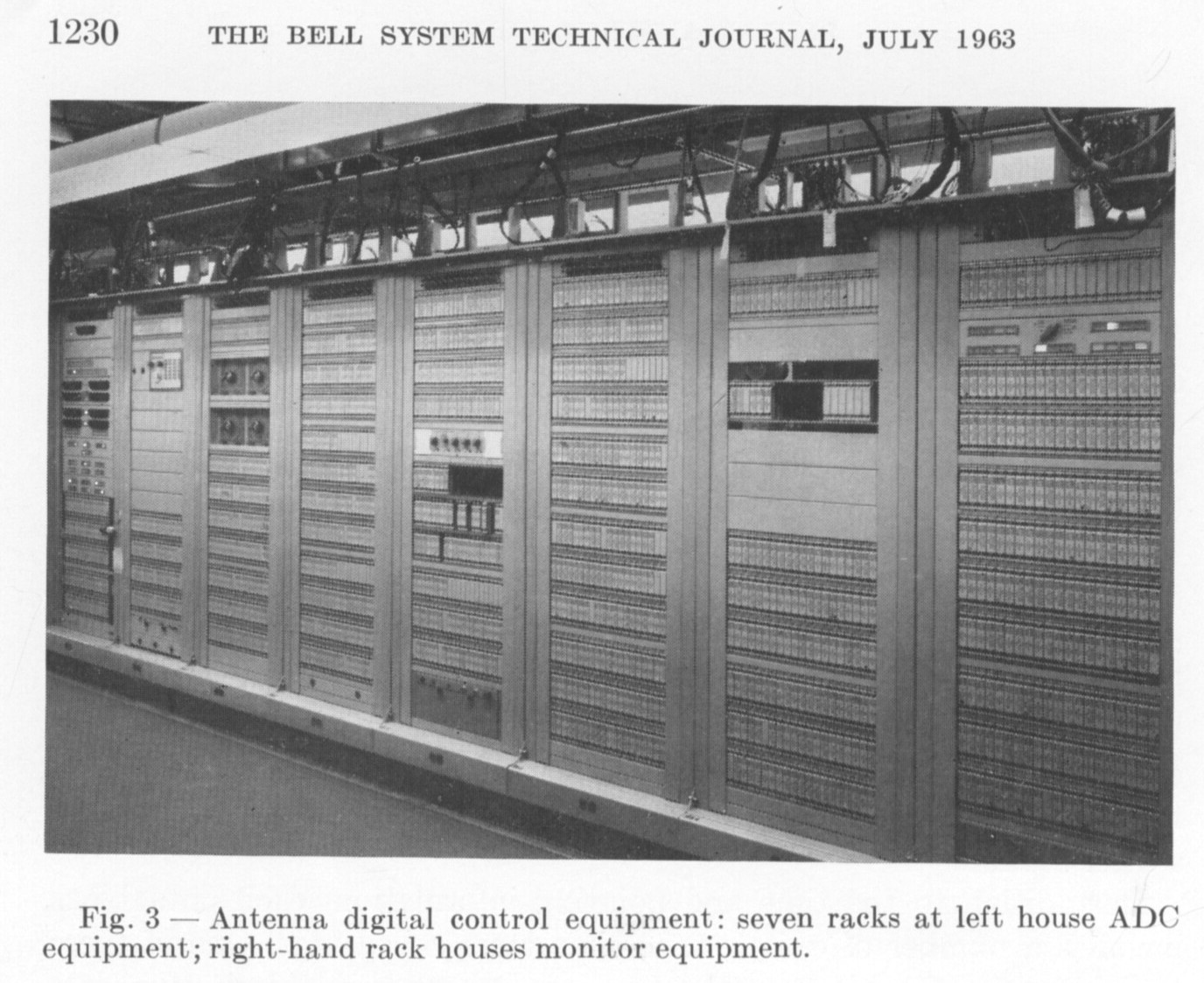
Une antenne complémentaire permettait de suivre indépendamment le satellite. La photographie montre la multitude de cartes électroniques réalisant 128 calculs de position / seconde.
Les circuits intégrés nexistaient pas encore et chaque petite carte équipée de composants discrets transistors, diodes, résistances, capacités ne réalisait quune petite fonction. Les données dentrée étaient stockées sur des dérouleurs de bandes magnétiques. Le centre de calcul utilisait 2 ordinateurs IBM 1620 comprenant une mémoire totale de 60 000 mots sous forme de tores ferrite (Voir les photos de cartes mémoires à tore dans la catégorie mémoire informatique et le site http://www.columbia.edu/acis/history/1620.html). Cette informatique est totalement obsolète mais pas la mécanique.